|
|
Caratteristiche
e parametri
 Il tipo di motore più usato è quello a magnete permanente.
L' ibrido, che generalmente viene preferito a quello di riluttanza variabile,
viene usato quando si richiedono elevate prestazioni. I valori più comuni
del passo di rotazione sono 1,8° 3,6° 7,5° 9° 15°. La frequenza dei passi
normalmente di qualche centinaio di passi/s può raggiungere valori elevati,
anche oltre gli 800 passi/s. Il tipo di motore più usato è quello a magnete permanente.
L' ibrido, che generalmente viene preferito a quello di riluttanza variabile,
viene usato quando si richiedono elevate prestazioni. I valori più comuni
del passo di rotazione sono 1,8° 3,6° 7,5° 9° 15°. La frequenza dei passi
normalmente di qualche centinaio di passi/s può raggiungere valori elevati,
anche oltre gli 800 passi/s.
|
|
|
|
| Sequenze
di stazionamento:
Viene attivato un avvolgimento
o fase alla volta secondo la sequenza illustrata in figura.
Azionamento unipolare
Inizialmente viene attivata la fase
AB con polarità positiva su A; la fase CD rimane disattivata. Si
crea allora un campo magnetico diretto verticalmente nel disegno,
con il nord nella parte di B ed il sud dalla parte
di A.Il rotore per l' effetto del campo di statore, si posiziona anch'
esso verticalmente, come illustrato in figura.
Successivamente viene attivata la fase CD, con la polarità positiva su
C. Il campo magnetico generato risulta ora diretto orizzontalmente,con
il nord dalla parte di D ed il sud dalla parte di C; il rotore compie
allora una rotazione di 90° in senso orario, allineandosi al campo magnetico
di statore.
La sequenza completa prevede le altre due attivazioni indicate in figura.
Il passo di rotazione nell' esempio riportato è di 90°. Lo svantaggio
rispetto al motore bipolare consiste nel fatto che la corrente,
e quindi la coppia generata è più bassa a causa della minor sezione dei
fili negli avvolgimenti. Il vantaggio è costituito per contro da una maggior
semplicità del circuito di pilotaggio. Oggi tuttavia esistono sul
mercato circuiti integrati espressamente progettati per pilotare motori
bipolari, che pertanto sono diventati i motori passo-passo più usati. |
|
|
|
Il
pilotaggio dei motori bipolari
I motori bipolari sono caratterizzati dall'avere solo
quattro fili di connessione. Una categoria particolare è costituita dai
motori unipolari a sei fili: è infatti sufficiente in questi motori non
collegare la coppia di fili comuni tra due fasi per ottenere un motore
bipolare, anche se in genere con caratteristiche peggiori di quelli che
nascono bipolari.   Per
questi motori il pilotaggio è più complesso che per quelli unipolari:
infatti la corrente deve attraversare gli avvolgimenti nei due versi e
questo rende piuttosto complesso il circuito di pilotaggio. Il vantaggio
deriva dal fatto che, essendo le fasi due anziché quattro, a parità di
potenza del motore, il peso e la dimensione sono minori in quanto è necessario
usare una minor quantità di rame. Inoltre, usando appositi schemi, è possibile
ottenere circuiti di pilotaggio più efficienti in termini di consumo energetico
e velocità di rotazione ottenibile. Infine si rende possibile introdurre
nuove modalità di pilotaggio senza appesantire in modo sostanziale le
difficoltà di progettazione dell'elettronica di potenza. Anche nel pilotaggio
bipolare sono possibili diverse modalità: Per
questi motori il pilotaggio è più complesso che per quelli unipolari:
infatti la corrente deve attraversare gli avvolgimenti nei due versi e
questo rende piuttosto complesso il circuito di pilotaggio. Il vantaggio
deriva dal fatto che, essendo le fasi due anziché quattro, a parità di
potenza del motore, il peso e la dimensione sono minori in quanto è necessario
usare una minor quantità di rame. Inoltre, usando appositi schemi, è possibile
ottenere circuiti di pilotaggio più efficienti in termini di consumo energetico
e velocità di rotazione ottenibile. Infine si rende possibile introdurre
nuove modalità di pilotaggio senza appesantire in modo sostanziale le
difficoltà di progettazione dell'elettronica di potenza. Anche nel pilotaggio
bipolare sono possibili diverse modalità:
| Passo |
Ph1 |
Ph2 |
| 1 |
I |
0 |
| 2 |
0 |
I |
| 3 |
-I |
0 |
| 4 |
0 |
-I |
|
WaveMode:
una sola fase alla volta è attiva. Da notare che le condizioni
di funzionamento per ciascuna fase sono tre: corrente in un
verso, corrente nell'altro verso, assenza di corrente (situazioni
indicate rispettivamente con I, -I e 0 nella tabella). |
| Passo |
Ph1 |
Ph2 |
| 1 |
I |
I |
| 2 |
-I |
I |
| 3 |
-I |
-I |
| 4 |
I |
-I |
|
Two phase-on: la corrente
è sempre presente nelle due fasi ma cambia verso. Questa modalità
ha degli effetti sulla coppia, che aumenta di 1.4 volte e sulla
corrente assorbita, che raddoppia. |
| Passo |
Ph1 |
Ph2 |
| 1 |
I |
0 |
| 2 |
I |
I |
| 3 |
0 |
I |
| 4 |
-I |
I |
| 5 |
-I |
0 |
| 6 |
-I |
-I |
| 7 |
0 |
-I |
| 8 |
I |
-I |
|
Half-step senza controllo
di coppia: è l'insieme dei due metodi precedenti, con l'effetto
principale di ottenere il raddoppio del numero dei passi. |
| Passo |
Ph1 |
Ph2 |
| 1 |
I |
0 |
| 2 |
0,707*I |
0,707*I |
| 3 |
0 |
I |
| 4 |
-0,707*I |
0,707*I |
| 5 |
-I |
0 |
| 6 |
-0,707*I |
0,707*I |
| 7 |
0 |
-I |
| 8 |
0,707*I |
0,707*I |
|
Half-step con controllo
di coppia: parlando della tecnica di pilotaggio a mezzo
passo ho accennato al fatto che, quando la corrente scorre in
due fasi contemporaneamente la coppia è maggiore di quando la
fase energizzata è una sola. Il problema è risolvibile riducendo
la corrente che passa nelle due fasi ad un valore tale che la
coppia rimanga costante. Chi ha voglia di pensarci un po' su,
scoprirà che tale corrente va ridotta a 0,707 volte quella nominale. |
Per regolare la corrente serve una notevole dose
di "intelligenza" all'elettronica di pilotaggio in quanto è necessario
inviare invece di una semplice onda quadra un segnale sinusoidale
variabile in fase e frequenza: in pratica applicazioni concrete possono
essere fatte solo con un processore dedicato oppure, recentemente,
con appositi circuiti integrati.
|
|
La
logica di pilotaggio
Osservando le tabelle riportate si vede come, per far
ruotare un motore passo-passo, sia necessario generare un'opportuna sequenza
di segnali logici. Questo può essere ottenuto in vari modi:
- Attraverso un circuito integrato specializzato:
In genere è il sistema più utilizzato. Per il controllo sono in teoria
necessari due soli segnali: uno per la direzione (indicato con le
sigle CW e CCW, cioè orario ed antiorario, corrispondenti allo scorrimento
della tabella dall'alto in basso o viceversa) ed un clock che, per
ciascun impulso, fa ruotare il motore di un passo nella direzione
voluta, cioè scorre una riga della tabella. In genere sono disponibili
altri pin ausiliari: scelta del funzionamento wave-mode, dual-phase
o half-step, spegnimento di tutte le fasi, varie uscite di controllo
utili per verificare lo stato del motore (eccessiva temperatura, cortocircuito,
bassa tensione di alimentazione...). Classici integrati di questo
tipo, ancora ampiamente utilizzati anche se tecnicamente superati,
sono SAA1027 per motori unipolari e L297 per motori bipolari.
- Attraverso circuiti digitali generici: Una scelta
raramente opportuna, a meno di avere necessità particolarmente semplici
(ad esempio serve la rotazione in un solo verso) oppure di disporre
di integrati digitali programmabili.
- Attraverso il pilotaggio diretto da parte di un processore:
Utile per risparmiare sul numero dei componenti, anche a scapito dell'efficienza
computazionale.
|
Il
diodo di ricircolo
Come ho detto più sopra i circuiti di pilotaggio che
ho disegnato sono solo di principio: infatti quando si pilotano carichi
induttivi è sempre necessario inserire il cosiddetto "diodo di ricircolo",
pena la repentina distruzione del transistor di potenza a causa delle
tensioni elevate generate da motore. Ciascun avvolgimento del motore passo-passo
è sostanzialmente un induttore, cioè un oggetto che tende a mantenere
costante la corrente che in esso scorre. Quando un transistor si apre,
la corrente istantaneamente dovrebbe andare a zero; l'induttore tende
però ad impedire questa repentina diminuzione e per fare questo tende
a far salire la tensione sul collettore del transistor (immaginate il
transistor che, improvvisamente, sia diventato una resistenza molto elevata
in cui l'induttore tenta di far passare una corrente elevata: per la legge
di Ohm, la tensione deve salire). La tensione arriva facilmente a centinaia
di volt, danneggiando il transistor stesso. Tale tensione è spesso chiamata
"di fly-back". Per evitare questo fenomeno distruttivo viene inserito
in parallelo alla bobina del motore un diodo che fornisce alla corrente
una via alternativa a quella del transistor nel momento in cui questo
si apre.
Il catodo va connesso alla tensione di alimentazione:
in pratica la corrente va "in salita". Nello schema è rappresentata a
sinistra la situazione in cui il transistor è in conduzione (la corrente
attraversa l'avvolgimento del motore ed il transistor; nel diodo non passa
corrente in quanto polarizzato inversamente). A destra invece l'andamento
della corrente subito dopo l'apertura del transistor: la stessa corrente
che prima attraversava il transistor ora passa nel diodo. Ovviamente quest'ultima
situazione si esaurisce abbastanza rapidamente, mancando generatori in
grado di mantenere nel tempo il passaggio di corrente. Una soluzione consiste
nell'utilizzo di diodi zener tra collettore ed emettitore del transistor,
con l'anodo connesso a massa: pur essendo migliore da molti punti di vista
(maggiore velocità di intervento, migliore dissipazione di potenza), questa
soluzione richiede dispositivi capaci di gestire elevate correnti alla
tensione di alimentazione del motore.
Con un motore medio da 1A per fase e 12 V di alimentazione
occorrono per esempio quattro zener da 15V ( > 12V) capaci di gestire
picchi di potenza da 15W ( > 1 * 15). |
|
|
Il
problema della massima velocità di rotazione
Come già accennato ciascun avvolgimento è sostanzialmente
equivalente dal punto di vista elettrico ad un induttore in serie ad un
resistore.
Il problema sorge dal fatto che in un motore passo-passo
in rotazione la corrente deve passare continuamente da un valore zero
al valore nominale; se il motore deve ruotare velocemente, queste commutazioni
devono ovviamente essere rapide. Purtroppo la velocità di commutazione
è limitata dalla costante di tempo (indicata dalla lettera greca Tau)
del circuito R-L costituito dall'avvolgimento stesso.
Un induttore tende a mantenere costante la corrente che
scorre in esso. Applicando una tensione a gradino ad un induttore la corrente
aumenta secondo una curva esponenziale la cui durata dipende dalla costante
di tempo Tau:

dove La è
l'induttanza ed Ra la resistenza equivalente dell'avvolgimento.
In genere non è possibile agire su La
per diminuire tale tempo in quanto dipende da come il motore è costruito.
Un effetto è che quando la velocità di rotazione del
motore aumenta l'assorbimento di corrente e la coppia meccanica disponibile
diminuiscono. Ciò limita la massima velocità di rotazione a valori piuttosto
piccoli, soprattutto nei motori ad elevato numero di passi/giro.
Aumentare la resistenza
Osservando la relazione sopra riportata si vede come,
per diminuire la Tau, basti aumentare la Ra: la
resistenza da utilizzare nella formula del tempo di carica è quella dell'avvolgimento
sommata ad una eventuale resistenza esterna da porre in serie all'avvolgimento
stesso.
Si considerino infatti i due schemi di pilotaggio riportati
nella figura (la differenza è l'inserimento della resistenza Rext, esterna
al motore), confrontando i diagrammi temporali qualitativi delle relative
correnti qui sotto riportati.
Nella prima delle due situazioni rappresentate è presente
solo l'induttanza La e la resistenza Ra equivalenti dell'avvolgimento,
parametri non modificabili senza costruire un nuovo motore. Il tempo necessario
perché la corrente arrivi al suo massimo dipende dalla già citata formula:
Nella figura il tempo necessario è qualitativamente rappresentato
in verde; la linea nera rappresenta l'andamento "ideale", cioè il caso
in cui, appena il transistor va in conduzione, subito la corrente sale
al suo valore massimo. Da notare che la perdita di coppia è legata alla
differenza dell'area compresa tra le due curve.
Nel caso in cui venga aggiunta in serie all'avvolgimento
una resistenza esterna, il tempo di carica dipende da:
tempo evidentemente minore. Nella figura è rappresentato
in rosso l'andamento della corrente nel caso in cui Ra=Rext: si noti il
dimezzamento del tempo necessario per far aumentare la corrente.
Esiste un difetto di questo metodo: per ottenere la stessa
corrente sia nel caso di assenza che di presenza della resistenza esterna,
devo avere tensioni di alimentazione diverse. Per esempio, se intendo
usare una Rext pari alla Ra, devo raddoppiare la tensione di alimentazione,
raddoppiando quindi la potenza elettrica da fornire. La potenza in eccesso
viene dissipata come calore dai resistori esterni che devono quindi essere
opportunamente dimensionati. |
|
|
|
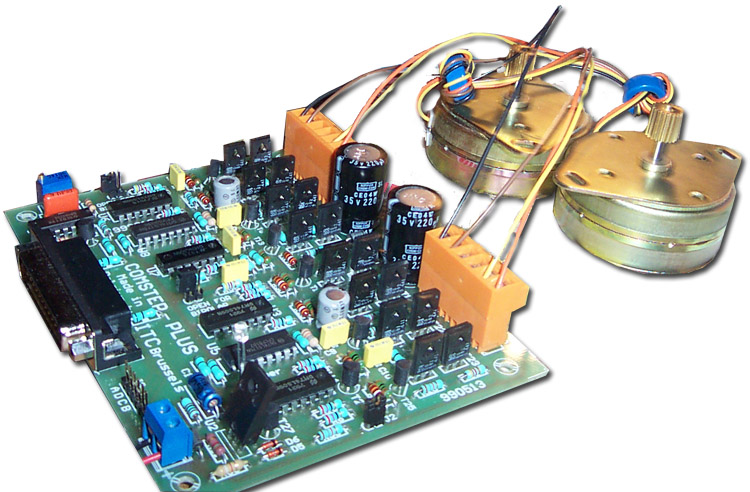
Foto
del circuito DualStep con annessi motori passo passo:
|
| |
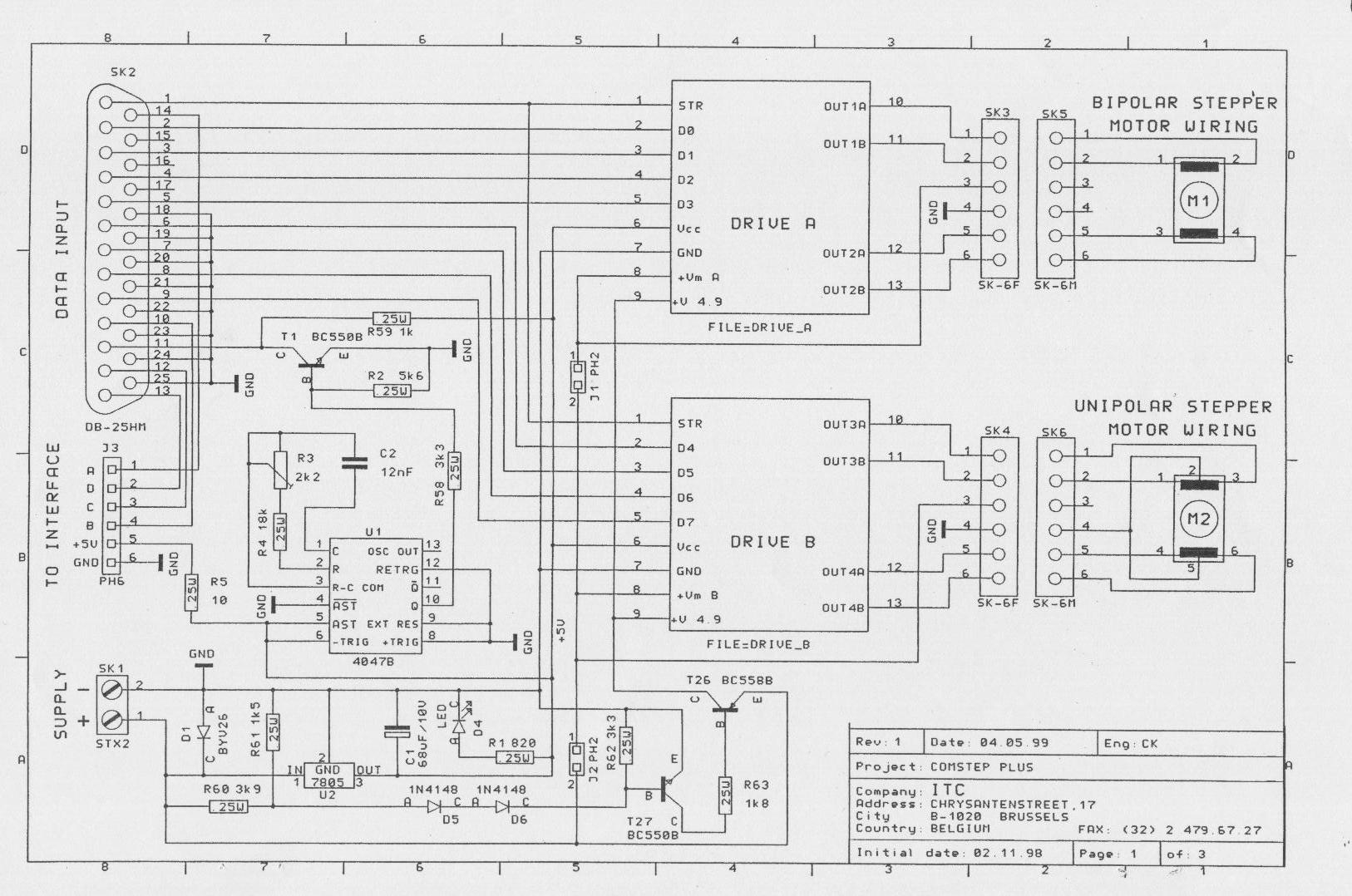 Schema
elettrico del circuito Schema
elettrico del circuito |
|
| |
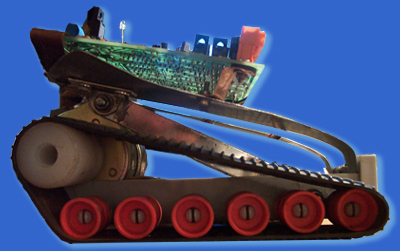
Fotografia
laterale del prototipo leggermente ritoccata. E' ben visibile il motore
di destra con il pignone che tiene in tiro il cingolo. |
Nel caso del nostro prototipo
i motori stepper sono pilotati da un software installato su un PC, che
accende i pin della porta parallela con delle sequenze prestabilite in
base al movimento che si vuole far fare al mezzo. Gli spostamenti direzionali
possibili sono:
Avanzamento su linea retta.
 
Avanti - - - Indietro
Avanzamento con un solo cingolo.
 -
-  - -  -
- 
Indietro a SX - Indietro a DX - Avanti a SX - Avanti a DX
Rotazione su se stesso.
 
Rotazione a DX - Rotazione a SX
Per ottenere questa direzionalità, bisogna incastrare
opportunamente le sequenze di stringhe da inviare al circuito attuatore.
Bisogna quindi che io descriva come fa uno spinotto a 25 poli a far camminare
un aggeggio con dei cingoli. Come ho descritto nella sezione della porta
parallela, uso 9 fili (+ la massa) dei 16 che mi vengono dati a disposizione,
di cui uno (il segnale di strobe o meglio il pin n°1) viene usato
come clock dei flip-flop del circuito. I seguenti 8 (8 bit di dati D0,D1....D7
o meglio pin 2,3,4,5,6,7,8,9) vengono divisi tra i motori, ovvero 4 ad
uno e 4 all'altro. Come è ben spiegato sopra, ad un motore passo-passo
bipolare (il tipo utilizzato in questo progetto) servono 4 polarizzazioni
diverse per completare una sequenza di movimento, quindi la tabella di
verità di un motore sarà:
D0 |
D1 |
D2 |
D3 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
Questa tabella descrive la rotazione di un motore in
un senso. Essendo i motori montati contrapposti sulla scocca, le stringhe
di rotazione sono a loro volta invertite, quindi per far procedere il
robottino in avanti dovrò fare:
Motore 1 |
Motore 2 |
D0 |
D1 |
D2 |
D3 |
D4 |
D5 |
D6 |
D7 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
1 |
0 |
0 |
1 |
0 |
1 |
0 |
1 |
1 |
0 |
0 |
1 |
1 |
0 |
0 |
1 |
0 |
1 |
1 |
0 |
1 |
0 |
Come si nota dalla tabella quello che cambia da mot.1
al mot.2 sono la seconda e la terza riga che sono scambiate; proprio per
far ruotare il magnete verso la bobina opposta al motore adiacente. |
|
|
|
| |
Glossario
Quest'ultimo paragrafo raccoglie alcuni termini spesso usati per descrivere
i motori passo-passo.
-
Step angle (angolo di passo): distanza angolare
tra due passi vicini. Valori normali sono 1.8° e 3.6°.
-
Step per revolution (passi per giro): il
numero di passi necessari per una completa rivoluzione, valore ovviamente
strettamente dipendente all'angolo di passo. Valori normali sono 100
passi/giro (equivalenti ad un angolo di 3.6°) e 200 passi/giro (1.8°).
Questo valore è in genere stampigliato in chiaro sul motore (o in
alternativa troverete l'angolo di passo). Nel caso non ci sia, potete
provare a contare gli scatti che si sentono ruotando a mano il motore
non alimentato. Da notare che tale valore si riferisce al pilotaggio
a passo intero.
-
Corrente nominale: è la corrente che attraversa
ciascuna fase nelle condizioni normali di funzionamento. In genere
è stampigliata sul contenitore del motore, in alternativa alla tensione
nominale. Occorre evitare correnti maggiori in quanto è facile arrivare
alla saturazione dei materiali magnetici oppure al surriscaldamento
degli avvolgimenti. Valori normali, relativi ai motori che normalmente
si trovano nelle vecchie stampanti, vanno da 0.5A a 2A o poco più.
-
Tensione nominale: è la tensione che, collegata
direttamente ad una delle fasi, produce la corrente nominale. Questa
non è necessariamente la tensione di alimentazione in quanto dipende
dal metodo di pilotaggio. Valori normali: da meno di 5V a 24V.
-
Resistenza della bobina: è il legame tra
tensione e corrente, in situazioni stazionarie. A volte è stampata
ma è comunque semplicemente misurabile con un multimetro.
-
Induttanza della bobina: raramente si conosce
questo valore. Inoltre non è molto significativo in quanto dipende
fortemente dalla posizione angolare del rotore. Per questo stesso
motivo è pressoché inutile misurarla con elevata precisione usando
un ponte RLC o tecniche analoghe.
-
Residual torque (coppia residua o anche
detent torque): la coppia che si oppone alla rotazione dell'albero
di un motore non alimentato. E' questa che permette di contare i passi
ruotando a mano l'albero.
-
Holding torque (coppia di tenuta): la coppia
che, con motore alimentato, si oppone alla rotazione. In genere è
piuttosto elevata e, anche per motori di piccole dimensioni, è praticamente
impossibile ruotare l'albero senza utilizzare una qualche leva. Da
notare che la massima coppia di tenuta la si ottiene ruotando l'albero
di 1/2 di passo: superato tale angolo, la posizione dell'albero scatta
al passo successivo.
-
Pull-in torque: è la coppia massima che,
applicata al motore, ne permette la partenza ad una data velocità.
-
Pull-out torque: è la coppia massima che,
con il motore in moto ad una data velocità, può essere applicata senza
far perdere il passo.
-
Pull-in rate (o anche pull-in speed): è
la massima velocità a cui il motore può partire, applicando una data
coppia.
-
Pull-out rate (o anche pull-out speed):
è la massima velocità a cui il motore può arrivare data una certa
coppia resistente. Tale velocità deve essere raggiunta con piccoli
incrementi di velocità.
-
Overshot: è l'oscillazione meccanica che
il motore compie intorno alla sua posizione di equilibrio subito dopo
uno spostamento. Dipende dal motore, dal pilotaggio e dal carico.
Qualche volta, se eccessivo, crea problemi alla meccanica, in particolare
l'usura degli ingranaggi.
-
Positional accuracy: indica la precisione
meccanica di posizionamento angolare, misurata in percentuale rispetto
all'angolo di passo. Valori normali sono intorno al 5% (cioè 0.09°
per un motore da 200 passi/giro). Tale errore non è cumulativo, cioè
dopo un numero arbitrario di passi, rimane in valore assoluto invariato.
-
Frequenza di risonanza: è la velocità di
rotazione, o meglio le velocità, dato che sono più di una, in cui
il motore eroga una coppia molto bassa, arrivando addirittura a fermarsi
spontaneamente.
|
|
|
|
| Quì
lo schema semplificato del sistema di controllo del prototipo su cingoli
|
|
|
Oscilloscopio
In questa immagine dall'oscilloscopio si vedono in
alto gli impulsi di clock (dal segnale di strobe della porta parallela)
ed in basso il livello di un pin usato per controllare la polarità
di un filo dello stepper.
|
|
|
|
| |
 |
| |
|

 e preciso. Un altro vantaggio rispetto al motore c.c. consiste nella maggior
robustezza, non avendo parti soggette ad usura come le spazzole.
Gli svantaggi sono costituiti dalla maggior complessità dei circuiti di
azionamento e da un rapporto potenza/volume più sfavorevole. I motori
passo-passo sono molto usati nelle periferiche degli elaboratori
(unità disco, stampanti, plotter, tavole X-Y) e nell' azionamento dei
robot. Costruttivamente si suddividono in motori a magnete permanente(PM),
a riluttanza variabile(VR) e ibridi(HY).
e preciso. Un altro vantaggio rispetto al motore c.c. consiste nella maggior
robustezza, non avendo parti soggette ad usura come le spazzole.
Gli svantaggi sono costituiti dalla maggior complessità dei circuiti di
azionamento e da un rapporto potenza/volume più sfavorevole. I motori
passo-passo sono molto usati nelle periferiche degli elaboratori
(unità disco, stampanti, plotter, tavole X-Y) e nell' azionamento dei
robot. Costruttivamente si suddividono in motori a magnete permanente(PM),
a riluttanza variabile(VR) e ibridi(HY).